Ovd-explorer: Optimism should not be the sole pursuit of exploration in noisy environments
May 1, 2024· ,,,,,,,,·
0 min read
,,,,,,,,·
0 min read
Jinyi Liu
Zhi Wang
Yan Zheng
Jianye Hao
Chenjia Bai
Junjie Ye
Zhen Wang
Haiyin Piao
Yang Sun
Overview
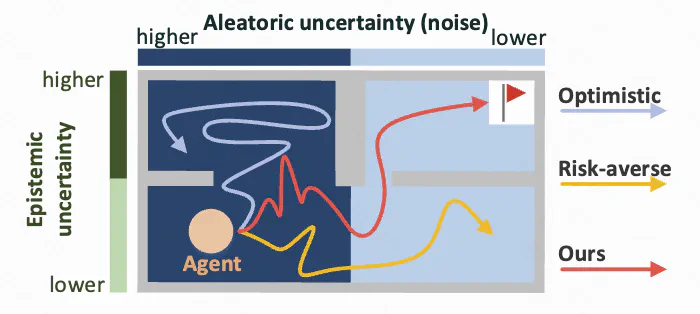
We propose Optimistic Value Distribution Explorer (OVD-Explorer) to achieve a noise-aware optimistic exploration for continuous control.
Venue. Proceedings of the AAAI Conference on Artificial Intelligence